技术联系人:陈晨 联系电话: 邮箱:cc2000@mail.xidian.edu.cn
关键词:无线连接;线控底盘;远程控制
项目概况:
(一)项目背景
本项目针对方向盘在自动驾驶车辆应用中的接口不统一、时延高、精度低等核心难题,依托基于5G/WiFi高可靠低时延远程驾驶技术、多样化测试场景开展攻关,旨在突破车内复杂的电磁环境下无线方向盘与车辆总线的接口、与车辆对齐的供电接口等存在的产业化限制,满足无线方向盘在自动驾驶辅助操控市场的迫切需求,对国内自动驾驶辅助操控研究及提升自动驾驶车辆的生产效率具有重大战略意义。
(二)项目简介
本适配线控底盘的智能便携无线方向盘研发与产业应用项目聚焦无线方向盘自动驾驶应用中接口不统一、时延高、精度低难题,通过高可靠低时延远程驾驶技术、多样化测试场景手段,实现了控制时延小于3ms,转向精度小于0.523弧度,开发出了一套完整的无线方向盘控制系统,已完成验证,有效解决了无线方向盘与自动驾驶车辆结合接口不统一,精度低等问题,为辅助操控自动驾驶车辆提供了技术支撑,具有推动辅助操控自动驾驶技术进步的示范意义。
(三)关键技术与创新点
本项目采用第五代通信技术及WiFi6技术,围绕无线方向盘与底盘连接展开技术攻关,重点突破连接过程中的时延高,精度低,接口不统一问题,通过基于第五代通信技术及WiFi6的远程控制方案实现时延小于3ms,弧度小于0.523弧度的目标,以下是本项目涉及的关键技术:
1、关键技术一:基于深度强化学习的智能编码调控技术。
2、关键技术二:远端控制与状态监测的预测控制技术。
3、关键技术三:面向复杂环境下的稳定信号控制技术。
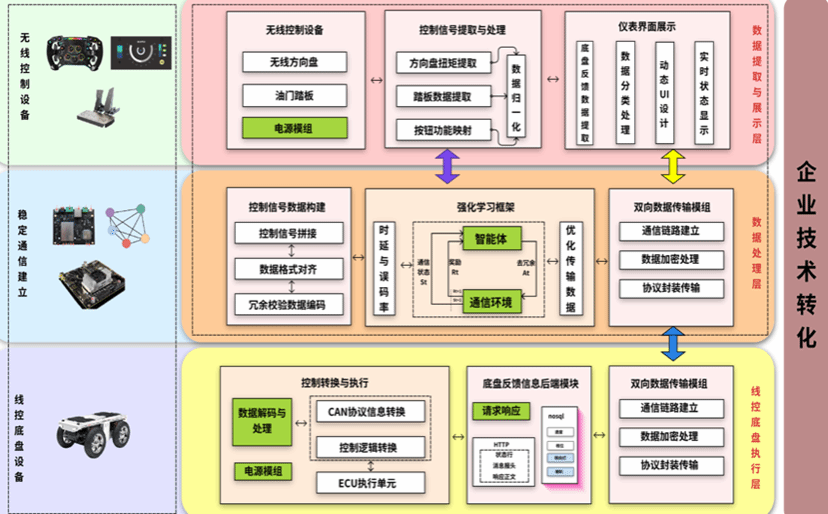
无线线控方向盘框架
本项目创新点包括:
1、首次提出基于深度强化学习的智能编码调控概念,解决复杂信道下控制信号的稳定性和时延保障问题。
2、设计适用于多种线控底盘的无线方向盘控制框架,突破了车内复杂的电磁环境下无线方向盘与车辆总线的接口、与车辆对齐的供电接口等存在的产业化限制。
3、开发了一套完整的高精度低时延无线方向盘远程控制系统。
技术成果清单:
序号 | 成果类型 | 具体内容 |
1 | 知识产权 | 车辆网络中保证业务时延要求的时隙分配方法,201210334907.2 |
2 | 知识产权 | / |
3 | 标准/规范 | 《车辆间通信技术要求》 |
4 | 其他 | / |
技术成熟度:
概念验证 原理样机 工程样机 中试 产业化
合作方式:
联合研发 技术入股 转让 授权(许可) 面议



