技术负责人:陈晨
技术联系人:陈晨 联系电话: 邮箱:cc2000@mail.xidian.edu.cn
关键词:智能驾驶;融合感知;域控制器
项目概况:
(一)项目背景
本项目针对新能源汽车中传统控制器功能繁杂、线束错综复杂、数量众多,难以适应日益增多的新能源汽车智能驾驶、复杂环境下传感器感知能力不足等核心难题,依托基于BEV视角的雷视融合感知技术开展攻关,旨在突破智能驾驶域控制器设计限制,满足当前新能源汽车智能驾驶对域控制器技术的迫切需求,对车企产业升级及改善人们出行方式具有重大战略意义。
(二)项目简介
基于BEV融合感知的智能驾驶域控制器项目聚焦新能源汽车中日益增多的电子控制单元控制困难问题,通过BEV融合感知及交通拓扑分析等手段,实现了适应新能源汽车的智能驾驶域控制器研究,开发验证域控制器原型系统,已完成验证,为新能源汽车智能驾驶域控制器研究提供了技术支撑,对智能驾驶域控制器研究具有标志性示范意义。
(三)关键技术与创新点
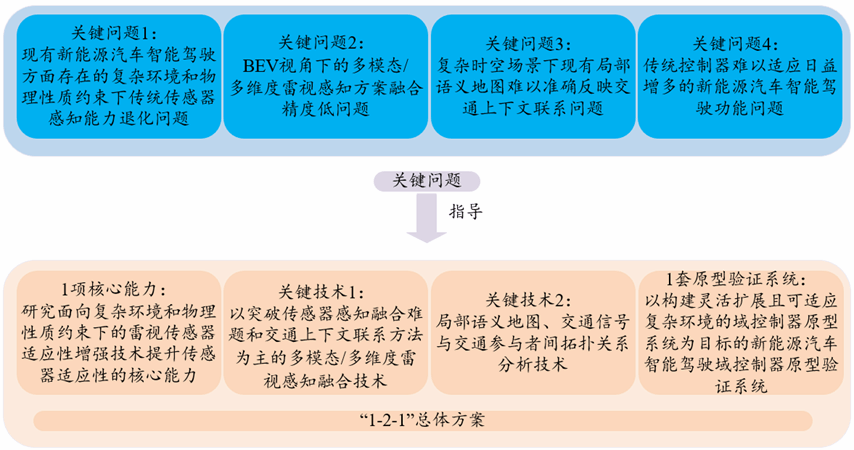
本项目采用BEV雷视融合感知技术,围绕域控制器研究展开技术攻关,重点突破复杂环境感知融合、复杂环境交通情况分析难题,通过BEV雷视融合及局部语义地图、交通信号与交通参与者间拓扑关系分析等构建灵活扩展且可适应复杂环境的域控制器原型系统,以下是本项目涉及的关键技术:
1、关键技术一:面向复杂环境和物理性质约束下的雷视传感器适应性增强技术。
2、关键技术二:基于BEV视角的多模态/多维度雷视感知融合技术。
3、关键技术三:局部语义地图和交通信号与交通参与者间拓扑关系分析技术。
智能驾驶域控制器方案
本项目创新点包括:
1、提出新一代智能驾驶域控制器原型系统设计,解决传统域控制器无法满足现有智能驾驶系统问题。
2、设计BEV雷视融合感知系统,突破传感器复杂环境感知能力退化难题。
3、开发智能驾驶域控制器原型系统。
技术成果清单:
序号 | 成果类型 | 具体内容 |
1 | 知识产权 | 基于粒子群算法的城市道路车辆连通度优化方法,201610322320.8 |
2 | 知识产权 | / |
3 | 标准/规范 | / |
4 | 其他 | / |
技术成熟度:
概念验证 原理样机 工程样机 中试 产业化
合作方式:
联合研发 技术入股 转让 授权(许可) 面议



